Kahua noi
ʻO ka mīkini lawelawe uila-hydraulic serving Dynamic Crague Creague Creague Skying Hiki i ka mīkini hoʻokolohua ke hana i nā hōʻike ma hope:
ʻO ka ho'āʻoʻana a Tensile a me ke koi
ʻO ka ho'āʻoʻana o Cleck Great
ʻO ka'ōnaehana hoʻomalu SERVE-Loop Service i hoʻohuiʻia i ka Luna Hoʻokele, Servo Valvey, Ho'ōla ma keʻano o ka hōʻike hōʻike, hele pololei hoʻi i ka hana hōʻike kihi.
Hiki i nā mīkini ho'āʻo keʻike i ka neʻeʻana o nā neʻe koʻikoʻi, nā mea like, nā mea likeʻole, a me nāʻano likeʻole, Hiki ke lako pūʻia me kahi mea hōʻike hōʻikeʻenehana e hoʻopau ai i nā hōʻike simulation simular ma nāʻano likeʻole.
ʻO ka mīkini ho'āʻo e maʻalahi a maʻalahi i ka hanaʻana. ʻO ka neʻeʻana o ka neʻeʻana i ka wana, ka locking, a me ka clamping clamping e hoʻopauʻia e nā hana hana. Hoʻohana ia i kaʻenehana service hydraulic drive e hoʻouka, nā nui kiʻekiʻe kiʻekiʻe loa i halaʻo Tynamic Waiwai a me ka neʻeʻana. ʻO ka'ōnaehana a pau a me ka'ōnaehana Hoʻokele a me ka mālamaʻana i ka hoʻopaʻaʻana i ka mana ikaika o ka ikaika, ka hopena a me ka paʻiʻana, a hiki ke hoʻokaʻawaleʻia kēlā me kēia mana. , Ua hana paʻa nā polokalamu hōʻike hōʻike ma ka Windows XP / Win7 Chinese World, Hoʻomalu o ka Pūnaewele Aʻoaʻo, a paʻiʻia. Hoʻopili pihaʻia ke kaʻina hōʻike hōʻike i ka mālama kamepiula. ʻO ka mīkini hōʻike i nā'ōnaehana ho'āʻo koʻikoʻi no nā hana noiʻi pono, nā hana aupuni, me nā'ōnaehana aupuni, nā mīkini lawe mai, nā mīkini hana.
Nā kiko'ī
| Hōʻailona | Pws-25kn | Pw-100kn |
| ʻO ka ikaika hoʻokolohua kiʻekiʻe | 25kn | 100kn |
| Hōʻike ikaika | 1/180000 | |
| Hōʻike hōʻike hōʻike hōʻike pololei | I loko o ± 0.5% | |
| Keʻaeʻia ana | 0 ~ 150 (± 75) (mm) | |
| Kaʻaeʻana i ka heluʻana | 0.001mmmm | |
| ʻOi aku ka maikaʻi o ka haʻaleleʻana i ka helu hōʻailona hōʻailona | I loko o ± 0.5% | |
| Kiʻi kiʻi kiʻi | 0 0 0 100hz | |
| Nā hōʻike hōʻike hōʻike maʻamau | 0 0 LIKE LIKE | |
| Nā Unting Havedorms | ʻO Sine Wave,ʻO nā Wave Wave, Raince Wave, hapalua cosine wave, ka hapalua o ka līlī | |
| Kāohi ho'āʻo (me keʻanoʻole) mm | 1600 (hiki ke hana maʻamau) | |
| ʻO ka laulā waena o ka'ōpū | 650 (hiki ke hanaʻia) | |
Kū-starder
1) GB / T 2611-2007 "mau koiʻenehana maʻamau no ka ho'āʻoʻana i nā mīkini"
2) Gb / T16825.1-2008 "nānāʻana o ka mīkini ho'āʻo e hōʻike ana i ka mīkini hana o ka mana o Tensile a (a iʻole)
3) GB / T 16826-2008 "" ElectRode-Hydraulic Mīkini Univerlical National "
4) JB / T 8612-1997 "ELDRO-Hydraulic Ssonso Univerlight Minning
5) JB9397-2002 "Nā Kūlana Kūlana o ke kūpaʻa a me ka hoʻoikaikaʻana i ka mīkini ho'āʻo
6) GB / T 3075-2008 "" a me keʻano hoʻokolohua met)
7) GB / T15248-2008
8) GB / T21143-2007 "UPIIMS TRANCE EXCOUNT NO KA HUI O KA MEA ANA I KA MANAWA"
9) hg / t 2067-1991 spell spell creatigue e hōʻike ana i nā kūlana mīkini mīkini
10) OTSM E466 Test Test of KC for linear Frain Strain Stracture
11) OTTM E1820 20020 2001 JIC hōʻike hōʻike hōʻike no keʻano o ka paʻakikī o ka paʻakikī
Nā hiʻohiʻona nui
1 hoʻokipa:Ua hakuʻia ka mea hoʻolaha i kahi papa kiʻi kiʻi, he pūʻulu o ka hui a Axiad kiʻekiʻe
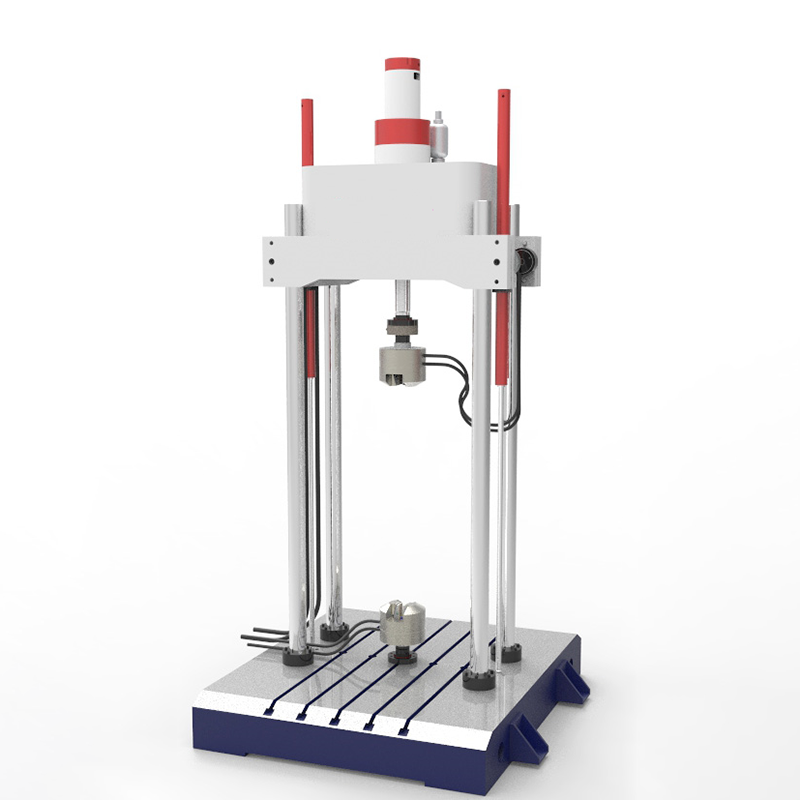
2ʻO ka pā'ālua hou.
ʻO ke kiʻiʻana o ka waihona kālā o ka mīkini nui e kauʻia iʻehā mau kiʻekiʻe, Mozed Beams a me kahi hana hana e hana ai i kahi hana paʻa. Hoʻomaka ka hoʻonohonohoʻana,ʻoi aku ka wikiwiki a me ka wikiwiki wikiwiki.
2.1 Axial Axiational Section: ≥ ke 100kn;
2.2 Premable Beam
2.3 TRANT STRESSE: 650 × 1600mm
2.4 E hoʻouka iā Sensor: (Qianli)
2.4.1 Nā kiko'ī sensor: 100kn
2.4.2 sensor lineartity: ± 0.1%;
2.4.3 sensor iverload: 150%.
3ʻO ka lawelaweʻo Dydraulic Servy Axiat linear:
3.1
3.1.1
3.1.2 Kuhiʻana: Hoʻopiliʻia nā mea hoʻopihapiha kikowaena waihonaʻoihana papani, e hoʻomaikaʻi ana i ka wikiwiki o ka'ōnaehana, a loaʻa ka kū'ē o ka ikaika ma hope.
3.1.
3.1.4 hoʻonohonoho:
A. LINEAL Actuas: 1
I. STACUCUN: BRUD STREED SDUS TECMITRIIcal SCEMMITRIIcal
II. Ka hōʻike hōʻike hōʻike kiʻekiʻe: 100 k;
III. Hōʻailona i ka hoʻoikaikaʻana o ka hana: 21mppa;
IV. Piston Stroke: ± 75mm; Kaha: E hoʻonohonoho i nā wahi hydraulic buffer;
b. ʻO ka Cervy Credit Electrol-hydraulic.
I. model: g761
II. RHEDLO SCHESM: 46 l / min 1'āpana
III. ʻO ke koʻikoʻi: 21mppa
IV. Ke hoʻoikaikaʻana: 0.5 ~ 31.5 MPA
c hoowela. Hoʻokahi'āpana magnetoctest
I. hoʻohālike: HR Series
II. ʻO ke anaʻana: ± 75mm
III. Hoʻoholo i: 1um
IV. Non-lineartity: <± 0,01% o ka piha piha>
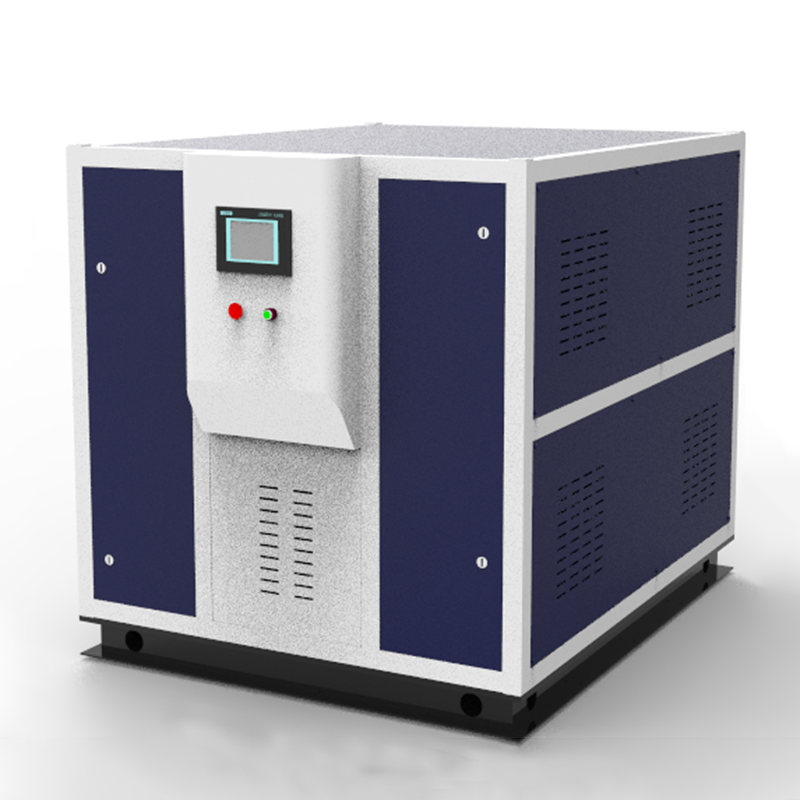
4 hydraulic servon servo mau kumuʻaila ikaika
ʻO ke kahuaʻo Pumping he kahua paʻa paʻa me kahi hoʻolālā hoʻololi. Sortitically, hiki iā ia ke cascaded i loko o kahi pā hale nui me nā kahe, no laila he nui ka scalability maikaʻi a me ka hoʻohana ponoʻana.
m · rand to rall 46l / min, kaomi ma ke kumu he 21mpa. (Hoʻoponoponoʻia e like me nā koi hoʻokolohua)
l · ka piha o ka mana 22kw, 380V,ʻekolu-bhase, 50hz, ac.
l · ua hoʻolālāʻia ka pahu pākuʻi a hanaʻia e like me ka hoʻolālāʻano maʻamau, me kaʻenehanaʻoihana a me ka hana paʻa; ua lako ia me kahi relay voltage e hoʻopili ana i ka countule e hoʻopili ana, e pili ana me ka mea hana.
m · ua maheleʻia ka palena palena o ka pumps, mū, a i nā papa kahakaha hekui kī, kīleʻa puna a me nāʻaoʻao'ē aʻe a me nā'āpana e nā ipu i nā ipu aila;
l · ke kiʻi kiʻi kiʻi kiʻi kiʻi iʻekolu mau kiʻi kiʻiʻekolu: E kāwiliʻana i ke awa Sheaster Sheation, 100μ; Office Firt Outlet, stutect decuracy 3 • E hoʻihoʻi hou i ka helu relale re re relack Votage, kiʻi pololei iā 3μ.
l · ua kohoʻia ka pumpilaʻaila mai ka gelford i loko o ka paila i loko o ke kikowaenaʻo Germania,ʻo nā ADOPTS e pili ana i ke olaʻo Gear Meming
l · ua hoʻolakoʻia ka hui o ka aila i ka mīkini uila (e koho i ka pā uila
l · E hoʻohana i nā hui kiʻekiʻe kiʻekiʻe a me ka haʻahaʻa haʻahaʻa haʻahaʻa e hoʻomaka a ho'ōki i ka'ōnaehana hydraulic.
l He kuleana no ka anaha o ke aniani, ka pina kahi ea kale, oihana Hoʻaihi, etc.;
L · Rear All: 40l / min, 21mpa
5. 5 koiʻia e hoʻohui i nā kiko'ī (koho)
5.5.1ʻO ka hydraulic i clamping clack clamping clamping. Paha;
l · hydraulic i ka clamping clamping, hana ikaika e hana ana i ka 21mpa, e hui ana i nā koi o keʻano kiʻekiʻe a me keʻano haʻahaʻa.
l · hiki ke hoʻoponoponoʻia ka hana hana,ʻo ka hoʻoponopono hoʻoponoponoʻana he 1mp-21mppa;
L · E wehe i keʻano, maʻalahi e hoʻololi i nāʻoni.
l · me ka ukuʻana iāʻoe iho, e hoʻopili i ka sensor i luna ma luna o kaʻaoʻao kiʻekiʻe o ka mīkini nui a me ka piston o ka mea hana haʻahaʻa.
l · clamping jawss no nā speck specherns: 2 mau hoʻonohonoho; clamping jaws no nā spect specimens: 2 mau: (E hoʻonui)
5.5.2 I hoʻokahi hoʻonohonoho o nā AIDS no ka hoʻopiʻiʻana a me nā hoʻokolohua e piʻi ana:
L
l · kahi hoʻonohonoho o nā meaʻekolu e piʻi ai i nā mea kōkua no ka crack e ulu ana i ka hoʻokolohua momona.